I am trying to build a very stable octocopter that flies in Loiter at about 4 MPH maximum, but I cannot seem to get the stability right, no matter what I do with the gain and PID controls. It seems to bob up and down almost infinitely, and nothing I do changes that. Does anyone have any suggestions?
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Low Speed Octocopter
- Thread starter patdan10
- Start date
legoman
Well-known member
I am trying to build a very stable octocopter that flies in Loiter at about 4 MPH maximum, but I cannot seem to get the stability right, no matter what I do with the gain and PID controls. It seems to bob up and down almost infinitely, and nothing I do changes that. Does anyone have any suggestions?
servo speed (ESC)?
legoman
Well-known member
Sorry, I am very much a beginner. How would go about checking that?
right here. But this may not be the issue (I just looked at the default Octocopter and there was only a gimbal servo which would not cause your problem) so I will ask this instead. are all the component in the physics tab aligned properly and all the propeller the right size and with the right motor for the propeller
Attachments

Hmmm, in my beginner's experience it seems to be correct to me? I haven't changed any of the default octocopter settings on them. How would I know? Also, are there resources where I can learn about this more technical stuff on my own, so I don't keep having to ask questions?
Thank you for your patience") .
.
Thank you for your patience
.legoman
Well-known member
Hmmm, in my beginner's experience it seems to be correct to me? I haven't changed any of the default octocopter settings on them. How would I know? Also, are there resources where I can learn about this more technical stuff on my own, so I don't keep having to ask questions?
Thank you for your patience
I have never really tuned a multirotor before so I am a newbie as well I have worked on one in RF before for some one else but it had some design flaws that 1 mph backwards or side ways meant crash was inevitable.
As far as how to set up/tune the electronics I don't think their was ever a tutorial on the forums someone point me too it if I am wrong.
With you current set up did you change the sizes from default at all that would require a retuned settings. it sounds like it is hunting for an altitude if that was the case I would check to make sure the motors are within spec as far a voltage , current, and watts. then check the throttle speed and throttle acceleration PIDs
No, I did not change the sizes of anything. All I've really done so far is limit the maximum speeds of the Loiter flight mode from the default Octocopter design. I'll be sure to check out the electric components tomorrow morning, and see if I can follow up. If it doesn't work out, I'll probably ask Knife Edge to help me out, as I saw they offered that in another thread.
I was worried there might be a new issue with the Multirotor Flight Controller, so I tried to create a slow copter like you describe. I was not able to reproduce your issue - the drone flew correctly after changing the loiter and vertical speeds.
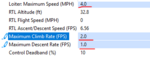
I started with the stock Octocopter 1000 and made only the changes underlined in the attached image. Perhaps you changed some of the lower-level gains instead?
In any case, making these changes resulted in a very slow and smooth flying octocopter. Please try them yourself (again, starting from the stock model) and let me know if it still won't behave itself.
We generally don't provide tech support through this forum, but I do like to address potential bugs where possible.
I started with the stock Octocopter 1000 and made only the changes underlined in the attached image. Perhaps you changed some of the lower-level gains instead?
In any case, making these changes resulted in a very slow and smooth flying octocopter. Please try them yourself (again, starting from the stock model) and let me know if it still won't behave itself.
We generally don't provide tech support through this forum, but I do like to address potential bugs where possible.
Attachments
Last edited: